The Vehicle Information Service Specification (VISS) is a
service for accessing vehicle information, signals from sensors
on control units within a vehicle's network. It exposes this
information using a hierarchical tree like taxonomy defined in
GENIVI Vehicle Signal Specification (VSS). The service provides
this information in JSON format. The service may reside in the
vehicle for applications needing to analyse a high volume of
realtime data or on servers in the internet with information
already brought off the vehicle.
This specification describes a second version of VISS which
has been implemented and deployed on production vehicles. It
adds major new capabilities and improvements to the earlier
version. The first version of VISS only supported WebSocket as a
transport protocol, the second version is generalized to work
across different protocols as some are better suited for
different use cases. HTTP is now supported with additional
protocols used within the automotive industry being evaluated
for inclusion. Subscription capabilities have been improved and
access control has been added.
There are two parts to this specification, Core and Transport. This document, the VISS version 2 CORE specification,
describes the VISSv2 messaging layer.
The companion specifications for the VISSv2 transport protocols detail the mapping of the messaging layer to selected transports.
The ontologies based on the VISSv2 core specification are defined in documents for each specific domain
(e.g. navigation, media, vehicle data).
Introduction
This document describes the messaging API for VISS protocol.
This includes the messaging layer and set of rules for structuring data.
The separation between payload encoding (transport) and messaging API (core) improves adaptability.
Extending and describing multiple transport protocols becomes possible.
The messages are exchanged between a server implementation holding the representation of data
and a client using the data.
The VISSv2 messaging layer uses a RESTful design for all methods exchanged via the interface ().
The VISSv2 data structuring rules (VSS Rule set)
are the same through all transport protocols.
The basis for structuring data hold by a server is a tree.
Terminology
The acronym 'VISSv2' is used to refer to this document, the VISS version 2 specification.
The acronym 'VSS' is used to refer to the 'Vehicle Signal Specification' which is hosted by the GENIVI Alliance.
The term 'WebSocket' when used in this document, is as defined in the
W3C WebSocket API and [[RFC6455]], the WebSocket Protocol.
Definitions
client
An entity that works with data managed by a server.
server
An entity that manages and offers access to data.
success response
The message being returned by the server to the client when no error is encountered. These are specific per request type
error response
The message being returned by the server to the client when an error is encountered. These have a common format for all request types
error notification
The asynchronous message being returned by the server to the client when an error is encountered.
data point
A structure containing one or more value, timestamp tuplets.
value
The data that is associated with one or more VSS nodes. Regardless of its data type,
a single data item is always represented as a string in message payloads.
timestamp
A date and time representation. See chapter .
filter
Additional to help the server in the selection of data for the client.
authorization
A token providing a verifiable proof that the client may be authorized access to the requested value(s).
subscriptionId
A handle identifying a subscription session.
purpose
A purpose is one of the short text entries from the .
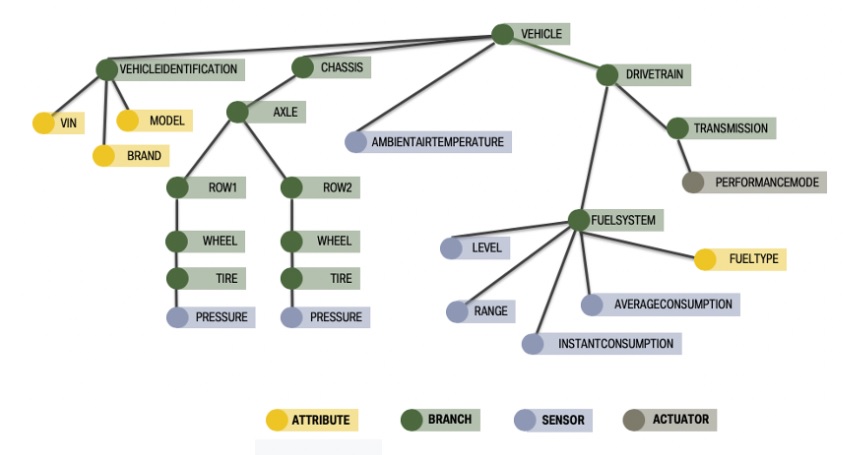
Data Model
The service is intended for use with a tree-like logical taxonomy to represent the vehicle data.
An illustrative example of such a tree structure is shown in Figure 1.
While it is meant to support conforming taxonomies it was created principally with the
Vehicle Signal Specification (VSS) in mind.
For more details, see the VSS documentation.
Diagram showing an example VSS 2.0 tree.
Addressing
Addressing of resources is done using URIs as defined in [[RFC3986]].
The scheme describes the protocol to use to reach the addressed resource.
For supported protocols, see the TRANSPORT specification.
The authority describes where to reach the resource, for more details see .
The path addresses a specific service within the resource, for more details see .
The query contains further information related to the addressed service, see .
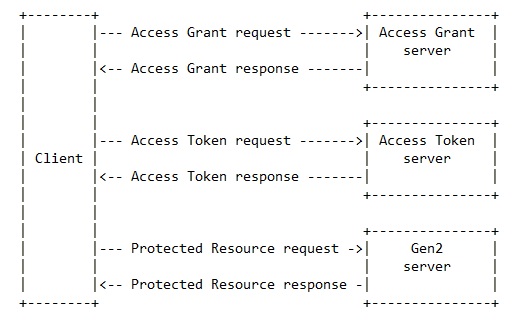
There are potentially three resources for which a client needs a URI, see :
VISSv2 server.
Access grant token server.
Access token server.
Authority URI Component
The authority component of the URI consists of an IP address or a domain name followed by a colon and a port number.
IP address / domain name
Depending on the deployment of a resource, either in the cloud or in a vehicle, they will have a domain name or an IP address, respectively.
A client is expected to obtain this part of the authority component via an interaction with the owner/manager of the vehicle
fleet. The details of this interaction is out of scope for this specification.
Port number
This section is non-normative.
The VISSv2 server shall use the following port numbers for the different transport protocols.
HTTP port number = 443.
Websocket port number = 6443.
MQTT port number = 8883.
The access grant token server shall use the port number 7443.
The access token server shall use the port number 8443.
A client may be provisioned with other port numbers than the above specified in its interaction
to obtain the other parts of the authority component, see .
Path URI Component
The path URI component definition differs between the three resources.
For the VISSv2 server the definition is as follows.
The path consists a sequence of VSS node names separated by a delimiter. VSS specifies the dot (.) as delimiter,
which therefore is the recommended choice also in this specification.
However, in HTTP URLs the conventional delimiter is slash (/), therefore also this delimiter is supported.
To exemplify, the path expression from traversing the nodes Vehicle, Car, Engine, RPM can be "Vehicle.Car.Engine.RPM",
or "Vehicle/Car/Engine/RPM". A mix of delimiters in the same path expression SHOULD be avoided.
The path MUST not contain any wildcard characters ("*"), for such needs see .
For the access grant token server the path is "agts".
For the access token server the path is "ats".
Data representation
This specification excludes "number" and "null" from the list of supported values that [[RFC8259]] declares.
The supported JSON value alternatives are thus:
value = false / true / object / array / string
A consequence of this is that number values MUST be represented as strings.
The format of these number strings MUST follow the number formats as specified in [[RFC8259]].
If data is represented incorrectly, then an error message with number 400, and reason "Bad data" MUST be returned.
A specific case of this is if an array of data elements does not contain the number expected by the server.
The server MAY then respond successfully, and follow a proprietary recovery policy,
or it MAY respond with error number 400, and reason "Invalid array size".
Interface
This chapter describes the different methods and its arguments that govern the communication between a client and the server.
Methods
The transport protocols used to implement these methods MUST implement the Read and Update methods,
and MAY implement the Subscribe, Unsubscribe, and Subscription methods.
Read
Purpose: Get one or more values addressed by the given path.
The client MAY have to obtain an authorization token before being able to access the values.
If the server is able to satisfy the request it MUST return a success response.
If the server is unable to fulfil the request, then the server MUST return an error response.
Arguments, of which path is mandatory:
path The path as defined in VSS to one or more nodes in the VSS tree.
filter Additional information defining the requested data.
timestamp The time of the server request execution.
Update
Purpose: Provide altered value to the vehicle signal(s) addressed by the path
The client MAY have to obtain an authorization token before being able to update the vehicle signal(s).
If the server is able to satisfy the request it MUST return a success response, else it MUST return an error response.
Only actuator type signals can be updated.
Please note that a success response does not guarantee that the actuation attempt to change to the updated target value has, or will, succeed.
A client may monitor the actuation progress through subsequent reads of the actuator value.
Arguments, of which path and value are mandatory:
path The path as defined in VSS to a single node in the VSS tree.
value The value by which the vehicle signal addressed by the path will be updated to.
timestamp The time of the server request execution. This may not be the same as the final update time of the signal.
Subscribe
Purpose: Get asynchronous messages containing the value(s) addressed by the path.
The triggering rules for issuing the notification messages are set by the filter data.
The client MAY have to obtain an authorization token before being able to subscribe to the vehicle signal(s).
The server MUST issue a notification if a trigger rule is fulfilled.
If the server is able to satisfy the request it MUST return a success response.
If the server is unable to fulfil the request, then the server MUST return an error response.
If an error occurs during the subscription period, the server SHOULD return an error notification.
Arguments, of which path and filter are mandatory:
path The path as defined in VSS to one or more nodes in the VSS tree.
filter The rule set describing triggering criterias for issuance of asynchronous notification messages.
subscriptionId A handle identifying notification messages associated with the subscription.
timestamp The start time for the subscription period.
Unsubscribe
Purpose: Termination of the subscription period started by a previous subscribe request.
If the server is able to satisfy the request it MUST return a success response,
and it MUST stop issuing notifications associated to the subscription handle.
If the server is unable to fulfil the request, then the server MUST return an error response.
timestamp The stop time for the subscription period.
Subscription
Purpose: Asynchronous client notification according to the subscribe request trigger rules.
The server MUST issue a notification message when a triggering rule associated with the subscription is met.
If the server cannot fulfill the triggering rules it MUST issue an error notification and terminate the subscription.
timestamp The time of the server subscription execution.
Error Information
The server MUST inform a client about errors ocurring in interactions between the two, whether it is in a synchronous
error response to a request message, or an asynchronous error notification message.
Error Format
The error information has three components - a number, a reason, and a message.
The number MUST always be part of the error information, while the reason and message components MAY be a part of it.
number See VISSv2:TRANSPORT, "Status code" chapter.
reason See VISSv2:TRANSPORT, "Status code" chapter.
message See VISSv2:TRANSPORT, "Status code" chapter.
Timestamps
Timestamps in transport payloads MUST conform to the ISO8601 standard, using the UTC format with a trailing Z.
Time resolution SHALL at least be seconds, with subsecond resolution as an optional degree of precision when desired.
The time and date format shall be as shown below, where the sub-second data and delimiter is optional.
YYYY-MM-DDTHH:MM:SS.ssssssZ
The exception to this is timestamps within tokens, which MUST conform to Unix time.
Security
Transport security
Transport protocols supported by this specification MUST make use of TLS as defined in [[RFC5246]].
Data security
The makes it possible to apply restrictions on the data access for clients that are
granted access on the transport protocol level.
Privacy
In addition to some privacy provisions within the
specification itself, the W3C Automotive Working Group is
creating an accompanying In-Vehicle Application Best Practices
document to provide further considerations for handling of
information. These Best Practices go beyond the narrow scope
of this specification and addresses several of the concerns
for the broader telematics ecosystems it is a part of. These
practices include reducing ability to fingerprint an
individual or vehicle from its data, providing data use
consent, revokation, integrity and use audit accountability.
For some uses, such as when information is only referenced within the vehicle not sent
off nor persisting between restarts, there should be little to
no privacy concerns.
This specification, unlike its predecessor, has granular
access control capabilities to limit what information an
application may access. All information sent from a VISS
service to client application must be transported over an
encrypted protocol to help protect privacy.
For an application to be installed and permitted to run on a vehicle it should
have consent from whoever is deemed authoritative for a given
jurisdiction and ownership situation. That consent should be
revocable. Consent and revoking it are outside the scope of
this specification, we expect that to be handled out of band
and in some cases by regulations and contractual commitments. Future version of this specification however may provide
mechanism for enabling and suspending application
authorization to access information.
Filter Request
Filtering is a mechanism to refine a client request, in order to more precisely control what is returned in a response.
Filtering can be applied in read requests and in subscribe requests.
A request where filtering is applied has the following structure
The JSON expression has the object format as shown below. For the case of an optional second object of this type,
these are enclosed in an array expression.
{"type":"<x>", "value":"<y>"}
where
type: the key name for the filter operation type, which can have one of the values:
paths:
one or more relative paths. In the case of several paths an array expression shall be used.
timebased:
data is captured repeatedly with a fixed period time.
range:
data is captured when values are in the given range.
change:
data is captured when the value since last capture has changed more than a fixed value.
curvelog:
captured data is processed according to the curve logging algorithm before being sent to client.
history:
the time period from current time and backwards in time.
static-metadata:
the response contains the VSS metadata of the addressed sub-tree.
dynamic-metadata:
the response contains metadata additional to the VSS specification.
value: the key name for the optional configuration data that the filter operation requires.
The value data varies depending on the type,
is enclosed in one object, or optionally an array of two objects, and is described in the following chapters.
In the JSON object, the key-value pairs "type" and "value" must always be present.
The JSON expression may consist of maximum one object with type "paths", plus maximum one object with any of the other types,
which are then logically combined as with an AND operator.
The server SHALL support all combinations up to this maximum.
The types time-based, range, change, and curvelog are only applicable for subscription requests.
Subscription requests are only supported by the websocket transport protocol.
The restriction on how many objects that can be combined is also set by the URL size restriction on 1k characters (*).
(*) 1k is the "conservative limit, which should always be supported, a more liberal limit is 2k, which is supported in most cases.
Paths Filter Operation
The paths filter operation is used when a single request is used to retrieve signal data from multiple data points in the VSS tree.
The vsspath shall point to the last node in the tree that is common for the relative paths in the filter value,
that start off from this node.
If the end point of a path in the filter value is a branch, then all leaf nodes in the sub-tree below this branch are addressed.
A path in the filter value may contain the wildcard character (*) as a representative for a path segment.
Every path element in an value array must address at least one node in the tree, or else an error response is returned.
If the path in the filter value ends with one or more wildcards,
then only the leaf nodes with path segments matching the number of wildcards are addressed.
Different elements of the value array may address the same node,
in which case it is the responsibility of the server to resolve this to a singleton in the notifications.
If the value contains a single path then it shall not be enclosed with JSON array brackets.
Examples can be found in the TRANSPORT specification.
History Filter Operation
The server typically have access only to the latest, most fresh data point representing a signal.
However, it may for various reasons at least temporarily have access to also older data points.
A scenario where this could occur is when a vehicle temporarily loses its connectivity,
maybe because it enters into a tunnel. Assuming that the vehicle detects the loss of connectivity, it may then start to record data.
If recorded, this data may then be accessed using the history type.
The vehicle system makes its own decision whether to record any data, and for how long this data will be kept in storage.
The period goes from current time, excluding the current value, and backwards in time.
The number of data points in the response depends on the period size, and the sample frequency.
The latter can not be set by the client,
so the client should have some understanding of its value to estimate the amount of data it may receive.
A request for historic data will return a Not found error (404) if historic data is unavailable.
The period must conform to the [[ISO8601]] duration format, expressed with days, hour, minute,
and second data, i. e. "value": "PdddDThhHmmMssS".
The number of days shall be less than 999. Only a single period can be expressed.
Examples can be found in the TRANSPORT specification.
Time Based Filter Operation
The value contains the period time X in between captures, {"period":"X"}.
X is an integer and represents the period time in milliseconds.
Examples can be found in the TRANSPORT specification.
Range Filter Operation
The value contains the range boundary, and the logical operator, {"logic-op":"X", "boundary": "Y"},
where X is one of the supported logical operators (**), and Y is the boundary of the range.
The value may be an array of two of these objects, combined through a logical AND to support expressions of a bounded range.
A range event is triggered both when the filter expression becomes "true", and when it becomes "false".
(**)The supported logical operators are ["eq", "ne", "gt", "gte", "lt", "lte"],
where "eq" is "equal", "ne" is "not equal", "gt" is "greater than", "gte" is "greater than or equal", "lt" is "less than",
"lte" is "less than or equal".
Examples can be found in the TRANSPORT specification.
Change Filter Operation
The value contains the logical operator for comparison of previous and current values, {"logic-op":"X", "diff":"Y"},
where X is one of the supported logical operators (**), and Y is the value of the required change.
(**)The supported logical operators are ["eq", "ne", "gt", "gte", "lt", "lte"],
where "eq" is "equal", "ne" is "not equal", "gt" is "greater than", "gte" is "greater than or equal",
"lt" is "less than", "lte" is "less than or equal".
Examples can be found in the TRANSPORT specification.
Curve logging Filter Operation
The value contains the maximum error limit, and the buffer size, {"maxerr": "X", "bufsize":"Y"},
where X is a float value setting the max allowed error between any data sample and the simplified curve,
and Y is the number of buffer elements. Data is processed when the buffer becomes full,
and the essential data points are returned as a time series per signal.
Examples can be found in the TRANSPORT specification.
Static Metadata Filter Operation
The static metadata request is used when the client instead of the data associated to VSS node(s)
wants to retrieve meta data associated to the VSS node(s).
The metadata is retrieved from the VSS tree that is deployed in the vehicle.
This type of request is sometimes referred to as a signal discovery request.
If the "value" key contains an empty string, then all metadata that the server can retrieve for the for the addressed node(s) are returned,
while if it contains metadata key name(s) then only the selected metadata is returned.
If the expression contains multiple metadata types, then they are represented as array elements.
For the set of static metadata key names,
see the Vehicle Signal Specification.
The vsspath in the request may point to either a leaf node, or to a branch node.
In the latter case then the response will contain static metadata from the entire sub-tree having this branch as the root.
A static metadata request can be combined with a paths filter operation to address multiple nodes,
but cannot be combined with any other filter type.
The response is a JSON formatted object with corresponding key-value pairs per addressed node.
Examples can be found in the TRANSPORT specification.
Dynamic Metadata Filter Operation
Dynamic metadata requests are used when the client instead of the data associated to VSS node(s) wants to
retrieve metadata that is additional to the VSS specification.
The dynamic metadata may change over time, which is not the case for the static metadata.
If the "value" key contains an empty string, then all metadata that the server can retrieve for the for the addressed node(s) are returned,
while if it contains metadata key name(s) then only the selected metadata is returned.
If the expression contains multiple metadata types, then they are represented as array elements.
The set of dynamic metadata keynames are found in the list below.
samplerate: the native capture frequency in Hz that is used by the vehicle system.
availability: the current availability of the signal(s). The possible values are ["available", "unavailable", "error"].
The unavailable status is returned when the signal is inaccessible due to the current vehicle state.
The error status is returned if the subsystem represented by the signal exists in the vehice, but is broken and requires repair.
validate: the access control rule that is applied to the node and its sub-tree.
The server response shall conform to the inheritance rules, see the access control selection chapter.
A dynamic metadata request can be combined with a paths filter operation to address multiple nodes,
but not with any other filter type.
The response is a JSON formatted object with corresponding key-value pairs per addressed node.
Examples can be found in the TRANSPORT specification.
Multiple Signals Request
The filtering operations may be used to address multiple tree nodes in one request.
This may lead to specific issues in certain situations, as described below.
Error Handling
A request addressing multiple nodes may address both valid nodes, and invalid nodes.
The latter case shall lead to a Forbidden error (403) response message part that contains information about which node, or nodes,
that are invalid.
The error response shall not contain data from any of the validly addressed nodes.
Response syntax
A response may contain multiple values, due to either that multiple nodes are addressed,
or to that multiple values for one signal is returned.
These two reasons can be combined, leading to four different cases.
Request for a single value from a single node.
Request for multiple values from a single node.
Request for a single value from multiple nodes.
Request for multiple values from multiple nodes.
The syntax to accomodate these four cases have a common structure where a data point ("dp") consists of one or more objects
containing a "value" and a timestamp ("ts"), and the complete aggregation ("data"),
consists of one or more objects containing a "path" and a data point (dp"). The syntax of the four cases are shown below.
In the case of a request for multiple values from multiple nodes, the datapoint for different paths may contain single or multiple objects,
as the vehicle system may not have multiple values recorded for all requested signals.
Subscription Notification Triggering
A subscription request must always contain a filter operation that describes the trigger event that leads to
that the server dispatches an asynchronous notification message.
For the filter types "range" or "change", the triggering is dependent on the signal value.
When the request addresses multiple signals, the triggering condition shall only be evaluated on one of the signals,
which is the first signal in the value array of paths.
The first path in the array must therefore not contain wildcards to address multiple signals.
In this case one of the path addresses in the wildcard expression must be selected as the first array element,
which can then be followed by the wildcard expression.
The duplicate reference to one signal that this leads to shall be resolved by the server to a singleton in the notifications.
Access Control Model
Access control MUST be supported. However, in this chapter only the sections that describe the interactions between the
client and the VISSv2 server are normative.
Architecture
This section is non-normative.
The VISSv2 access control model is inspired by the concepts of OAuth2.0 [[RFC6749]],
but some deviations exist as is described in the following chapters.
Four actors are defined: Client
An application making protected and authorized resource requests on behalf of its
user. Access grant token server
The server issuing the Access Grant credential after successfully authenticating the client. Access token server
The server issuing the access token to the client
after successfully validating the request and obtaining authorization. VISSv2 server
The server hosting the protected resources, capable of accepting and responding to protected resource requests using
access tokens.
The abstract protocol flow illustrated in the figure below describes the interaction between the four actors. The abstract protocol flow.
Besides the four actors directly involved in the abstract flow, there are two more actors. Resource owner
This is typically the driver of the vehicle, who may be asked for consent before access is granted. Ecosystem manager
The entity managing the access control ecosystem. It controls the Policy documents,
and manages the PKI ecosystem that the other actors may utilize.
The abstract protocol flow is implemented by two different flows, as will be described in the following chapters.
The process to obtain the credentials needed for client authentication is out-of-scope,
as well as the installation procedures for the applications.
Protocol Flows
This section is non-normative.
Two different flows are described. Which flow to use depends on the capabilities of the client.
If a client is able to run public key cryptographic primitives,
i.e. key pair generation and signatures,
and has access to some kind of trusted execution environment where private keys are protected from the regular execution environment,
then it can use the long term flow. Clients that do not have access to these capabilities,
or do not want to use them, must select the short term flow.
The advantage of using the long term flow is that the client can be trusted with longer expiry times of
access grant tokens.
In the short term flow the client must due to a shorter expiry time contact the
access grant token server more often to obtain a new
access grant token.
A client selects the type of flow by either submitting a public key in the
access grant request, or not. The latter leading to an short term flow.
Protocol Messages
This section is non-normative.
This chapter describes the payloads of the messages used in the protocol flow.
Access Grant Request
The request shall contain the Context and Proof parameters below, the other two are optional:
VIN: The vehicle identification number. This may be a pseudo-VIN,
or any other identity that uniquely links to the vehicle in the access control ecosystem.
Context: The context associated to the client.
The context consists of a triplet of roles for user, app permissions,
and device characteristics.
Proof: A proof mechanism that is used by the client
to attest its context to the access grant token server.
This is indeed a composed proof for the User role, app permissions,
and device characteristics.
Public key: If this parameter is present, the client will receive a long term
access grant token in return.
Depending on the kind of proofs included in the request,
the client and the server may need to run an interactive protocol to verify them.
The protocol may involve also third parties, such as the ecosystem manager or the
resource owner. The protocol is out of scope for this specification.
In scenarios where both the client and the access grant token server
are deployed in-vehicle the VIN parameter may be omitted, in all other deployment scenarios it shall be present.
The access token server acts as a Policy Enforcement Point,
making decisions on whether to grant access to the protected resource based on the provided
access grant token and purpose.
Access Token Response
A successful response shall contain the parameter:
Access token: The token to be used in client
requests to the VISSv2 server for Protected Resources.
An error response shall contain the parameter:
Error code: The error code shall be informative in order for the client
to understand what it needs to correct to become successful.
Protected Resource Request
This is a VISSv2 request including an access token as described in general in the
chapter,
and for different transport protocols in the VISSv2 TRANSPORT document.
Protected Resource Response
This is a VISSv2 response as described in general in the chapter,
and for different transport protocols in the VISSv2 TRANSPORT document.
It does not differ from the response to an unprotected resource request.
Actors
Client
This section is non-normative.
The client is an abstract representation of three sub-actors:
The device. It is in charge of running the Apps that make requests to the VISSv2 server
All the information regarding the client is encoded in the context of the request.
Access Grant Token Server
This section is non-normative.
The access grant token server is in charge of producing access grant tokens to
clients.
Depending on the capabilities of the client, the specification supports two types of
access grant tokens: Short term and long term
access grant tokens.
Long term access grant tokens,
are supported for those clients able to run public key cryptographic primitives,
i.e. key pair generation and signatures,
and is the recommended choice for clients with access to a trusted execution environment where
private keys are protected from the regular execution environment.
The specification also supports short term access grant tokens that require
no extra capabilities in the client,
but due to its shorter expiry time it forces the client to contact the access grant token server more often before
access token server requests for an access token.
The client request shall contain the following:
In scenarios where both the client and the access grant token server are deployed in-vehicle the VIN parameter may be omitted,
in all other deployment scenarios it shall be present.
A VIN.
When a VIN is present in the request, the vehicle identity (vin) claim shall be present in the
access grant token.
If the client needs a long term access grant token,
then the request shall also contain:
A public key.
The Vehicle identification number shall be for the vehicle that the client wants to access.
The client context contains all relevant information from the client,
i.e. for each of the three sub-actors that the client represents.
The proofs are to be used for verifying the client context.
The public key shall be generated by the client,
and the associated private key must be under control of the client.
The main responsibilities of the access grant token server are:
To verify the client context, and assess that their respective role request can be granted.
To check that the vehicle represented by the VIN belong to this Ecosystem, and is accessible.
The proofs may include certificates from a Certificate Authority known by the
access grant token server.
For example, users might authenticate themselves using X.509 identity certificates and roles might be issued using attribute certificates.
In those cases, as part of the authentication protocol,
the access grant token server shall also validate the certificates signatures.
The access grant token server may contact the ecosystem manager for checking the VIN.
The access grant token generation is defined in the corresponding chapter.
Access Token Server
This section is non-normative.
The client shall after a successful interaction with the
access grant token server
request an access token from the access token server.
The client request shall contain at least these two parameters below.
For long term access grant tokens, i.e. those including a public key, the
client must also include a proof of possession,
for the corresponding private key, in the request.
The purpose must be supported by the ecosystem manager, and thus be on the
purpose list.
The purpose list associates a set of accessible signals to the purpose,
thus realizing the principle of least privilege.
The main responsibilities of the access token server are:
The validation of the access grant token consists of at least the following:
Signature validation.
Expiry time check.
Additionally, for long term access grant tokens, the access token server needs to verify the
proof of possession using the public key contained in the token.
The access grant token signature validation is done with the
access grant token server public key.
To allow for some time synchronization inaccuracy and minor network latency,
expiry times should be set to include potential modest margin of error, possibly as long as tens of seconds.
If a vehicle identity claim (vin) is present in the access grant token,
the vehicle identity (vin) claim SHALL be included in the access token.
If the client context as declared in the access grant token
does not match in the set of allowed roles for the requested purpose in the purpose list,
then the client request for an access token must be denied.
Access Control Server
The VISSv2 server MUST support validation of access tokens.
The functionality needed for this is decribed in this chapter.
This includes validation of at least the following:
Token signature.
Token expiry time.
Token signal scope.
Token access permission.
If a vehicle identity claim (vin) is present in the token, then it MUST be validated to match the identity of this vehicle.
If any of the mentioned validations fail, the server MUST reject the access request.
Token signature validation may be delegated to the access token server,
if a secure communication link can be established.
If not delegated, then a preprovisioned common secret may be shared with the access token server,
or other PKI based solutions may be used.
The VISSv2 server SHALL have access to a secure system time, that cannot be modified by actors without system acknowledged credentials.
Time validation may allow for a time synchronization inaccuracy in the range of tens of seconds.
A successful signal scope validation requires that all the nodes addressed by the path in the request MUST
be matched by the paths associated with the purpose in the purpose claim of the access token.
Validation of the device and app roles may involve MAC address checks,
or message round-trip measurements.
The access permission validation MUST have the outcome shown in the table below,
when comparing the type of the client request with the access control mode in the
purpose list that is associated to the purpose claim in the access token.
If the client request contains several signals, and one fails the validation,
then the entire request MUST be rejected.
Permission
read-only
read-write
get set subscribe
Ok
Ok
Nok
Ok
Ok
Ok
The access token need to be refreshed periodically, which is controlled by the expiry time.
If the access grant token that the client used to obtain the now expired
access token is not expired,
then the client can revisit the access token server with this
access grant token to obtain a new access token.
If the access grant token is expired, then the client must obtain a new
access grant token first,
before revisiting the access token server.
The server SHOULD support caching of a limited number of access tokens.
The access token MUST be included in the cache after a first successful request and
MUST be removed once they expire.
The client can decide to include only the jti claim in following requests in order to save bandwith.
At any point the server might decide to remove any token from the cache. In this case the client will get a "401,
missing_token" error and will be forced to send the whole access token again.
For client requests that are not granted due to access control,
the VISSv2 server MUST return one of the error codes shown in the table below.
Error Number (Code)
Error Reason
Error Message
401 (Unauthorized)
missing_token
One or more of the requested signals are access controlled, an access token or its jti,
must be included in the request.
406 (Not Acceptable)
invalid_token
In case the request included an access token, a fresh one must be obtained.
In case the request included just the jti, the whole access token needs to be send again.
406 (Not Acceptable)
insufficient_priviledges
The priviledges represented by the access token are not sufficient.
Resource Owner
This section is non-normative.
The resource owner is typically the owner and/or driver of the vehicle. If Consent is required for granting access to the protected resource,
then it should be directed to the resource owner. The process for this is out of scope for this specification.
Ecosystem Manager
This section is non-normative.
The Ecosystem manager is the entity responsible for the functionality of the access control system.
This typically includes the management of the access grant token server,
and the access token server, the Policy documents,
and that there is a PKI domain for the other actors to utilize.
Credentials
Client Authentication
This section is non-normative.
The three client sub-actors must provide authentication credentials to the
access grant token server.
This may be certificates that the sub-actors have obtained from a Certificate Authority that is known by the
access grant token server.
The interactions related to this are out of scope.
Access Grant Token
This section is non-normative.
Short Term Access Grant Token
The short term access grant token shall have the following claims in header and payload,
where all but the vehicle identity (vin) claim are mandatory.
The algorithm (alg) claim shall be set to a valid RSA or ECDSA algorithms according to [[RFC7518]].
The type (typ) claim shall be set to "JWT".
The vehicle identity (vin) claim may be present or not, depending on input to the
access grant token server.
The issued at (iat) claim shall be set to the time of token issuance, in Unix time.
The expiry (exp) claim shall be set to the time when the token expires, in Unix time.
The Client context (clx) claim shall be set to the role triplet the client has been assigned.
The delimiter separating the roles is a plus sign (+).
The audience (aud) claim shall be set to the URL "w3.org/VISSv2".
The JSON Web Token identity (jti) claim shall be set to a UUID that is unique within the domain controlled by the
ecosystem manager.
Long Term Access Grant Token
Except for the vehicle identity (vin) claim that is optional,
the long term access grant token SHALL have the following claims in header and payload.
The algorithm (alg) claim shall be set to a valid RSA or ECDSA algorithms according to [[RFC7518]].
The type (typ) claim shall be set to "JWT".
The vehicle identity (vin) claim may be present or not, depending on input to the
access grant token server.
The issued at (iat) claim shall be set to the time of token issuance, in Unix time.
The expiry (exp) claim shall be set to the time when the token expires, in Unix time.
The Client context (clx) claim shall be set to the role triplet the client has been assigned.
The delimiter separating the roles is a plus sign (+).
The public key (pub) claim shall be set to the public key that the client provided in the
access grant request, using the JSON Web Key (JWK) data structure [[RFC7517]].
The audience (aud) claim shall be set to the URL "w3.org/VISSv2".
The JSON Web Token identity (jti) claim shall be set to a UUID that is unique within the domain controlled by the
ecosystem manager.
Access Token
Except for the vehicle identity (vin) claim that is optional, the Access token SHALL have the following claims in header and payload.
The algorithm (alg) claim shall be set to any valid algorithms according to [[RFC7518]].
The type (typ) claim shall be set to "JWT".
The vehicle identity claim (vin) may be present or not, depending on its presence in the
access grant token.
The issued at (iat) claim shall be set to the time of token issuance, in Unix time.
The expiry (exp) claim shall be set to the time when the token expires, in Unix time.
The scope (scp) claim shall be set to the purpose list short name,
which logically links to the signal scope as defined in the purpose list.
The Client context (clx) claim shall be set to the role triplet the client has been assigned.
The delimiter separating the roles is a plus sign (+).
The audience (aud) claim shall be set to the URL "w3.org/VISSv2".
The JSON Web Token identity (jti) claim shall be set to an unguessable UUID that is unique within the domain controlled by the
ecosystem manager.
Proof of Possession
This section is non-normative.
Long term access grant tokens need to be accompanied by a Proof of Possession (PoP)
for the private key corresponding to the public key included in the access grant token.
This requirement enables a longer validity for this kind of tokens, ranging from a few days to a even a year.
By adding the PoP, we prevent an eavesdropper to reuse an access token request,
impersonating the client. Without a PoP, the longer the validity of an access grant token,
the higher the risk an attacker could intercept and reuse it.
PoP for JWT are defined in [[RFC7800]], but in essence,
a PoP enables the requester to proof to the server that it has access to a private key, without disclosing it.
Traditionally that would require the server to create a random challenge, or nonce, and ask the client to sign it with its private key.
Along with the public key,
the server would be able to verify the PoP.
This scheme would require an extra step in the protocols, where the client ask for the nonce.
In order to avoid this extra step, the client can generate the nonce itself. The server would need to check that nonces are not reused.
Although logging previous nonces at the server side would work for small environments,
we propose the use of an incremental nonce in the form of a timestamp.
One of the drawbacks of this proposal is that the server has no means to check whether the PoP has been precomputed or not.
However, this is irrelevant from the eavesdropper point of view.
In case freshness of the PoP was a critical requirement, we could use a public source of randomness to obtain the nonce,
e.g. Leage of Entropy or
Interoperable Randomness Beacons.
That would provide the server a mean to check freshness of the PoP but on the other hand,
it would require the client to access the public source of randomness every time it needs to create a PoP
which is against the main design goals for the long term access grant token.
Client Context
This section is non-normative.
The client actor is characterized by three subactors:
Each of these subactors is in turn characterized by a role,
building on the concept of a Role Based Access Control (RBAC) model.
The set of these three roles is called the Client context.
VISSv2 specifies a rudimentary list of roles for each subactor, it is expected that these lists are augmented by the
ecosystem manager, hopefully in a cooperative effort.
Using an RBAC model provides the following main purposes in the VISSv2 access control model:
The access grant token server must in the authentication process of the client
possibly separately authenticate each of the three subactors.
For the access grant token server to decide on which authentication method to use per subactor
can be quite complex, but may be somewhat eased by the client request for roles for each subactor.
Following the principle of least priviledge, a client should not have access to more vehicle signals than necessary.
This is achieved by the purpose list, that assigns only the for the
purpose relevant signals to the client.
User Roles
VISSv2 specifies the following minimum set of roles for users:
OEM
Dealer
Independent
Owner
Driver
Passenger
An OEM user is anyone representing the vehicle brand.
A Dealer user is anyone representing a normally OEM affiliated organisation that provide sale and workshop services for the vehicle.
An Independent user is anyone representing a normally OEM independent organisation that provide after-market services for the vehicle.
An Owner user is anyone representing the organisation owning the vehicle.
A Driver user is anyone driving the vehicle.
A Passenger user is anyone travelling in the vehicle, but not being the Driver.
Application Roles
VISSv2 specifies the following minimum set of roles for applications:
OEM
Third party
An OEM application role is used for applications that are pre-installed in the vehicle by the OEM, or later OEM-provisioned to the vehicle.
A Third party application role is used for applications that are "certified" for vehicle deployment, but developed by a third party.
Device Roles
VISSv2 specifies the following minimum set of roles for devices:
Vehicle
Nomadic
Cloud
A Vehicle role is used for applications that are deployed in-vehicle, in e. g. the center stack ECU.
A Nomadic role is used for applications that are deployed in a user's mobile phone, laptop, etc,
that uses short range radio communication like Bluetooth, or WiFi.
A Cloud role is used for applications that are deployed in off-vehicle devices,
and uses a long range radio communication like cellular in the connection to the vehicle.
Policy Documents
This section is non-normative.
The Policy documents are typically owned and created by the ecosystem manager.
They need to be handled securely to protect their integrity.
The ecosystem manager shall securely provision them to the
access token servers in the access control ecosystem.
Purpose List
A client shall provide a purpose as input to a request for an access token.
A list of supported purposes needs to exist for a client to select from.
The ecosystem manager shall therefore provide means for clients
to survey the list to find a purpose that fits its use case.
Each entry in the list contains a short description of the purpose, which is what the client
shall provide as input to its request for an access token.
There is also a long purpose description, which may be used in the dialogue for consent, if needed.
Then there is a list of the client context, i. e. the sub-actor role triplet,
that can be granted this access, and last there is a list of the signals that the client is given access to for this purpose,
with the allowed access permission. The list shall use a JSON format as shown in the example below.
The purpose list shall be securely provisioned to the access token server.
The protocol for this is out-of-scope.
The access token server must reject all requests for access tokens
if it is not in possession of a purpose list.
Scope List
The scope list contains a list of the VSS tree nodes for which access shall be prohibited, per
client context.
This prohibition is regardless of whether the client has a valid
access token or not.
The scope list can also be used to limit the node metadata that is returned on a service discovery request.
Each entry in the list contains a list of paths to nodes that should be excluded, and a list of the
client contexts, i. e. the sub-actor role triplet,
for which this exclusion should be made.
The scope list may contain an entry for a context with all three Roles set to "Undefined".
The no-access scope of this entry shall then be used for signal discovery requests where no token is included.
The list shall use a JSON format as shown in the example below.
The scope list shall be securely provisioned to the access token server.
The protocol for this is out-of-scope.
The access token server shall not restrict the scope for any
client context if it is not in possession of a scope list.
Access Control Selection
This section is non-normative.
This chapter describes a complementary functionality to the access control model, the ability to apply it selectively to parts of the tree.
It can be used in cases where not all nodes of the tree are believed to require access control,
or where write-only validation is sufficient instead of read-write validation for certain nodes.
This functionality requires that the access token specifies whether the access permission granted to the
client to a signal is read-only, or read-write.
It also requires that the metadata for the node in the VSS tree contains data specifying whether
the access control verification should be carried out only for write request, or for both read and write requests.
The former requirement is realized as described in earlier chapters by that the access token
scope claim links to a purpose where the signals and their respective access permission are found.
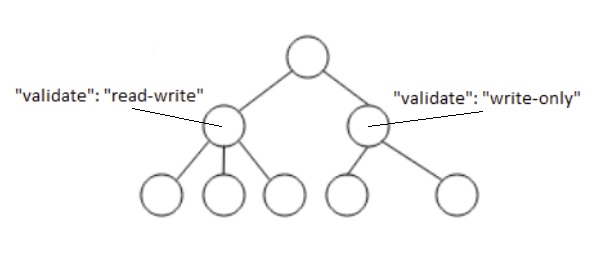
The latter requirement is realized by adding to nodes in the VSS tree the key-value pair "validate":'access-control-mode',
where 'access-control-mode' is either the string "write-only", or "read-write". Access control selection tagging.
The figure above shows an example where both read and write requests to the three leftmost leaf nodes will be access controlled,
while the two rightmost leaf nodes only will be access controlled for write requests.
An inheritance rule leads to that any nodes below a tagged node are assigned the same access control, if they are untagged.
This metadata is not likely to be applied to the standardised VSS tree,
as different implementers of this standard may have different views on which nodes to apply it to.
Instead it is anticipated that it is applied at a "deployment" stage, possibly using the VSS layering concept.
The inheritance model, which says that if access-control-mode data is added to a node,
then all nodes in the subtree for which this node is the root inherits the setting,
unless there is access-control-mode data added to any node in this subtree,
makes possible a reduction of the number of nodes this metadata have to be added to.
This allows for example an entire VSS tree to be assigned an access-control-mode by merely applying it in the root of the tree.
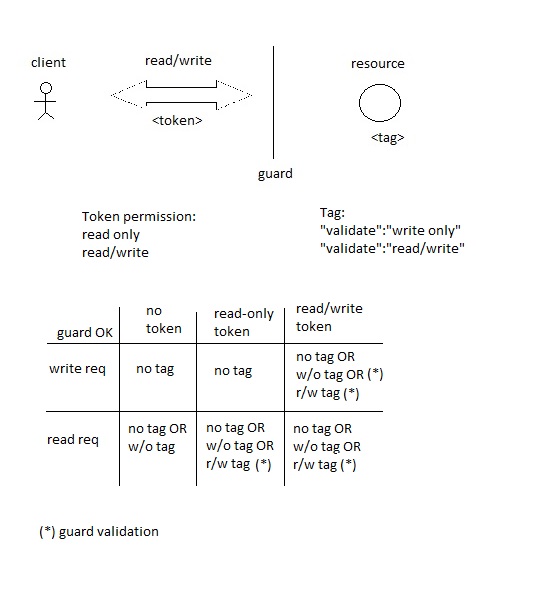
The figure below shows an overview of the access control selection model,
and a table showing the required access control tagging of a node for the VISSv2 server to grant the requested access.
Access control selection model.
If the VSS tree used by a VISSv2 server contains access control selection tags,
then the server MUST support their usage as described in this chapter.
If it is not used, then a server may implement access control for the entire tree.